The intuitive answer is wrong. When people ask why Mars rovers use wheels instead of legs, the usual response is something like "wheels are simpler" or "legs break more easily." Both are true, but they miss the actual engineering argument — which is about energy, not complexity.
Wheeled locomotion wins on Mars primarily because it is efficient. As researchers at JPL have documented, wheeled rovers offer energy efficiency, mechanical simplicity, and continuous ground-supported stability in ways that legged systems currently cannot match. On a planet where your power budget is fixed by solar panels or an RTG, and where a single bad traverse can end the mission, efficiency isn't a nice-to-have. It's the constraint that shapes every other decision.
The Energy Math Doesn't Favor Legs
Here's the core trade-off: legs require constant actuation to maintain stability. Every moment a legged robot stands still, it's burning power fighting gravity. Wheels, by contrast, are passively stable — park a wheeled rover on a slope and it stays there without drawing a watt. Over a multi-year mission covering kilometers of terrain, that difference compounds dramatically.
The JPL research on ERNEST, a four-wheeled rover concept with an actively articulated suspension, illustrates what happens when you do add active actuation to a wheeled platform: even with the added complexity of a two-degree-of-freedom gimbal suspension, the system still had to justify its energy cost. On a 20° sandy slope, the learned controller reduced the cost of transport by 37% on dry sand despite the additional actuation — but that's the point. Engineers are measuring cost of transport obsessively, because every joule spent moving is a joule not spent on science instruments.
Legs would face this accounting on every single step.
What "Simple" Actually Means in This Context
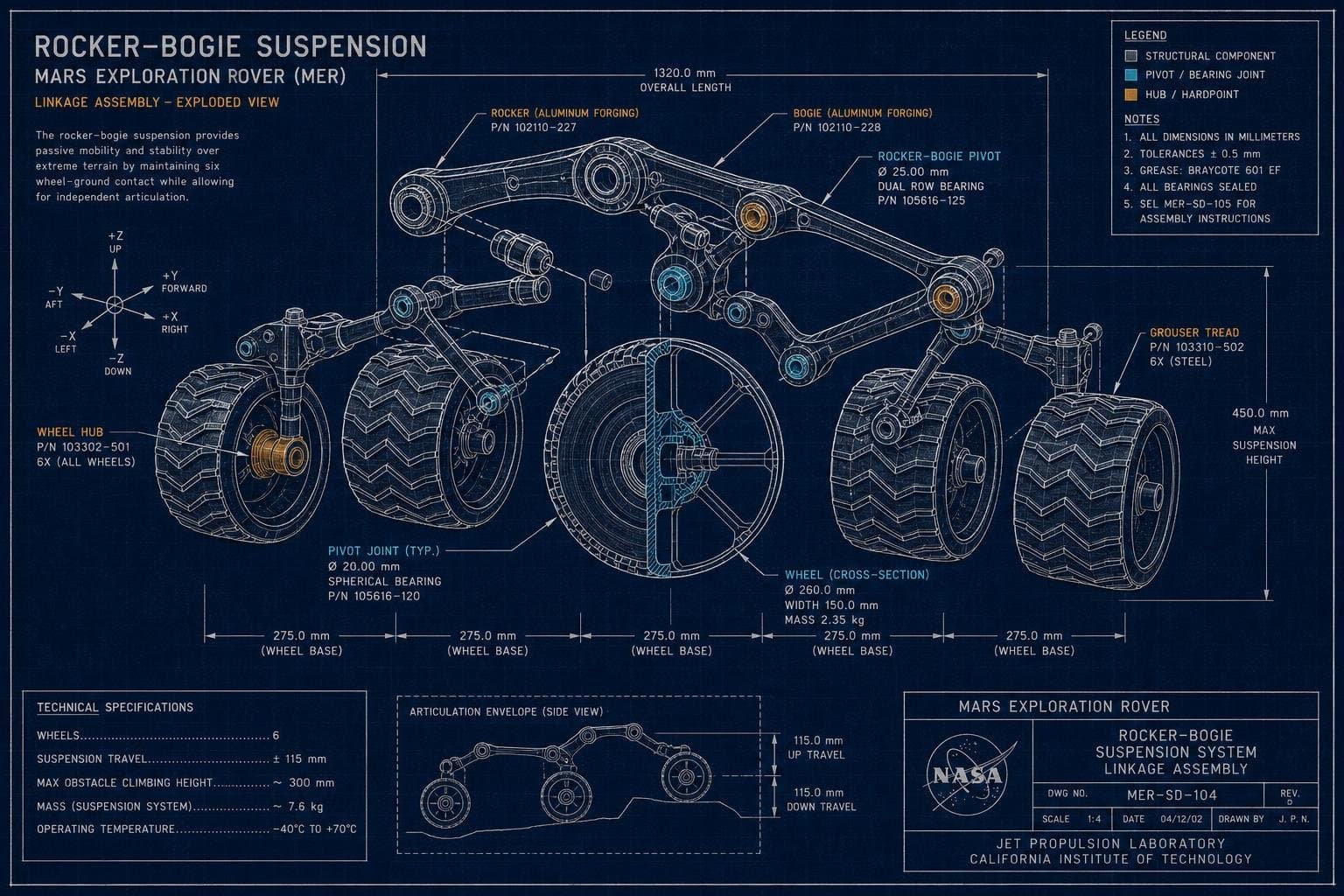
Mechanical simplicity isn't about part count. It's about failure modes and repairability — or more precisely, the complete absence of repairability. When Curiosity's wheels started showing damage from Mars' unforgiving terrain, JPL engineers couldn't send a repair crew. NASA's timelapse of Curiosity's wheels, spanning January 2020 through March 2026, shows six years of accumulated wear on each of the rover's roughly 20-inch-diameter wheels — punctures, bent grousers, torn aluminum. And yet Curiosity kept driving. The rocker-bogie suspension design distributes load across all six wheels so that even a significantly damaged wheel doesn't strand the vehicle.
A legged system with a failed actuator in one limb faces a categorically different problem. The gait has to be completely replanned, load redistribution is harder, and the failure modes cascade in ways that are much harder to design around from 140 million miles away.
The Grouser Problem Reveals How Hard Wheels Already Are
If wheels were truly "simple," engineers wouldn't still be actively researching how to make them work better. Recent work on terrain-adaptive grouser wheels — designs that can continuously adjust grouser height for different surfaces — found that adaptive deployment reduces slip by 30–58% and improves travel time and energy consumption by up to 77.4% in granular regimes relative to fixed configurations. The punchline from that same research: no single grouser height minimized slip across all terrains, which is why fixed-wheel systems keep running into trouble on loose regolith.
This is the hidden complexity of the "simple" wheel. Getting traction on sand, rock, and compacted soil with the same hardware is a genuinely hard problem — one that engineers are still solving. The six-wheeled design that both Perseverance and Curiosity share has proven durable enough to survive years of this punishment, but "durable enough" has required constant monitoring, software updates, and route planning adjustments from the ground. The fact that wheeled rovers remain the preferred platform despite these known limitations tells you something about how much harder the alternatives are.
Where This Is Heading
The wheel-vs-leg debate isn't settled forever — it's settled for now, given current power budgets, actuator reliability, and control systems. The JPL work on ERNEST's neural network controller, which achieves zero-shot transfer to the physical rover through domain randomization and sensor noise injection, suggests that the control gap between wheeled and legged systems is narrowing. And Perseverance's first AI-planned drives on Mars, completed in December 2024, demonstrate that autonomous navigation is advancing fast enough to eventually make more complex mobility systems operationally viable.
Meanwhile, Perseverance itself has been traversing the Martian surface for more than five years, steadily accumulating the kind of long-range traverse data that will inform whatever comes next. The NASA Space Roboticist Challenge signals that the agency is actively investing in next-generation mobility concepts — the question of what replaces the rocker-bogie is already being asked in earnest.
The wheel isn't the final answer. It's the answer that survives contact with the actual constraint set — and on Mars, that's the only kind of answer that counts.


